ロボットモデリング -MATLABによるシミュレーションと開発- (2007年オーム社)
MATLAB Source Code
uicontrol非推奨にともなうGUI関数の変更(MATLAB2020b)に対応しました。(2021/05/06)
Simscape Multibody(MATLAB2020a)の仕様変更対応しました。(2020/06/28)
この本は、大きく分けて
・車輪型移動ロボットのモデリング
・ロボットアームのモデリング
の2つのロボットモデリングの例題により構成されています。
1つ目の「車輪型移動ロボットのモデリング」,これは、MATLABとSimulinkによるもの2つのアプローチで解説しています。
Simulinkによる移動ロボットシミュレータ
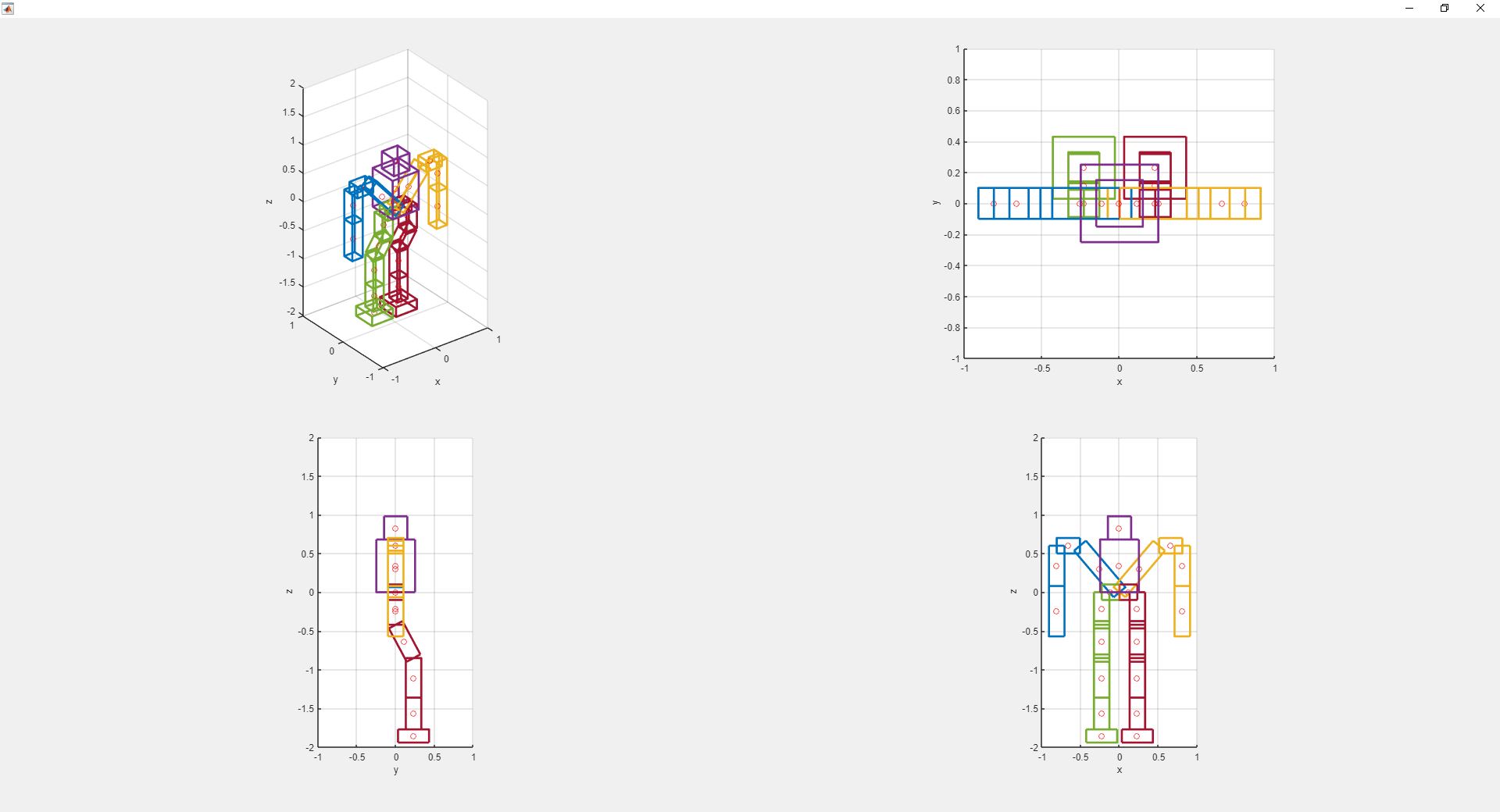
2つ目の「ロボットアームのモデリング」,ここで解説するモデリングは、行列指数関数をベースとした3次元回転行列を用いた同次変換行列によるリンク構造体による方法です.このモデリング法は、一般的なロボット工学の本とは異なりますが、3次元空間での動きの表現が容易であることと、MATLABでの実装に適しています。その例題として2足ロボットのシミュレーションの例をあげて説明しています.
リンク構造体応用によるロボットシミュレーション
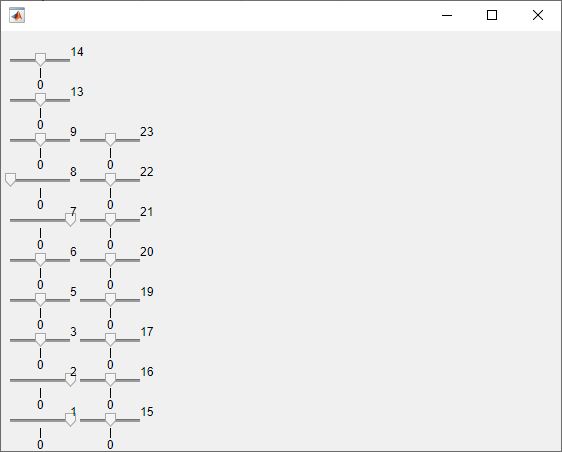
MATLABの最新UIに対応した例 (ch7\vectest11ademo2021.m)
MATLAB2020bで確認 スライダーの仕様変更にともない、スライダーを別ウィンドウに出るように変更しました。
ロボットモデリング正誤表も合わせて参照をお願いいたします.