p.100 Simulinkによる移動ロボットの実装でのglobal宣言の回避策(2007.08.23)
著書では、Simulink上のブロックで、定数を使うために、global宣言する方法を書きましたが、Constantブロックを使うとそれを回避できるようです。ただし、著書で利用しているMatlab Fcnでは、入力と出力が両方とも複数の変数を引数にすることができないためgmapを1次元の変数に変換し入力変数と合成して入力しているためあまりスマートな実装ではありません。
MATLAB Embedded Functionを使えば、入、出力変数の数に制約がないためスマートな実装できそうですが、肝心な描画に必要なplot関数をサポートしていないためこの例題では使えません。参考のためにglobal宣言を回避した実装例を
mobilesim2demo.lzh
としてアップしておきます。
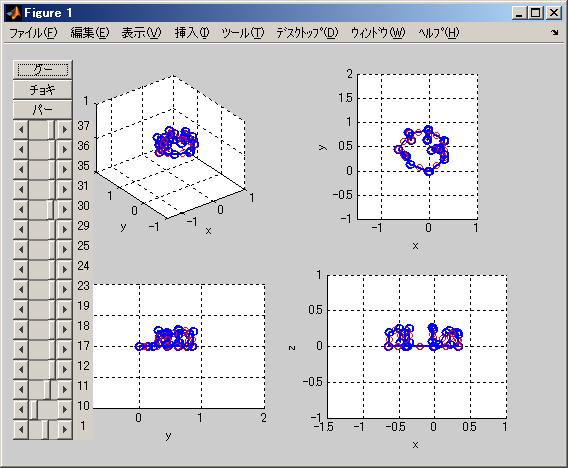
大学院の授業で出した課題の優秀な学生の作品の一つです。課題だけで終わらせるのはもったいないので、ここに掲載しました。
ロボットモデリングのarm構造体のスクリプトを応用し作成した38自由度のアームで構成した手の3次元モデルです。
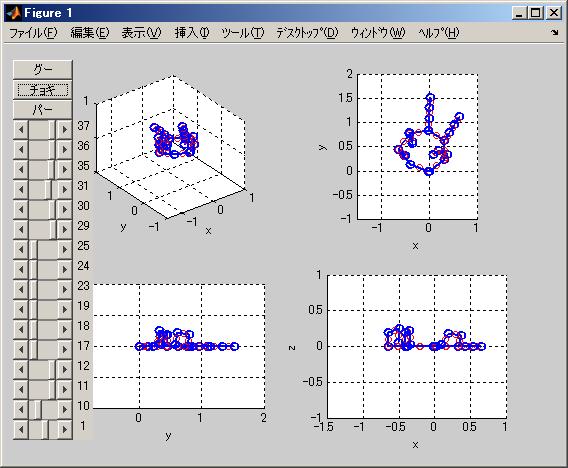
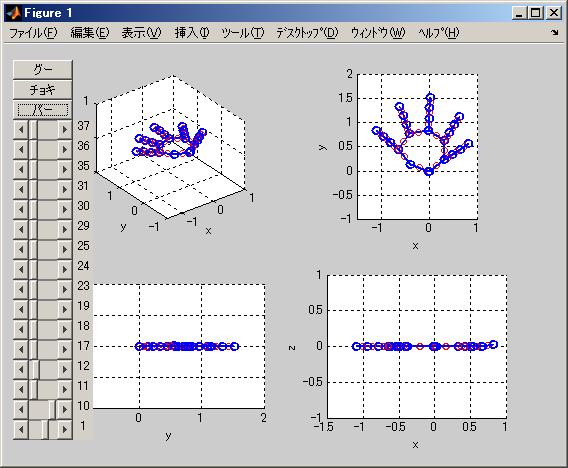
ボタンを押すことで、グー、チョキ、パーと動かすことができます。
inaba.lzh
としてアップしておきます。