MEX関数応用その2....................................................................................................... 63
Hough変換とは?........................................................................................................ 63
Hough変換のアルゴリズム.......................................................................................... 63
実際のHough変換のインプリメンテーション............................................................. 64
MEX関数によるHough変換アルゴリズムのインプリメント...................................... 65
1.サイン・コサインテーブルの作成.......................................................................... 65
2.
find関数による二値化.......................................................................................... 65
3.hough変換処理..................................................................................................... 66
4.処理データの配列処理............................................................................................ 66
MEX関数 高速化のためのテクニック........................................................................ 68
Hough変換の使用例.................................................................................................... 70
Hough変換サンプル例その1................................................................................... 70
Hough変換サンプル例その2................................................................................... 63
量子化誤差の影響の軽減............................................................................................... 63
高速化のためのファインチューニング.......................................................................... 64
Sparse行列、Uint8行列への対応................................................................................ 65
演習問題........................................................................................................................... 68
MEX関数応用その2
近年、コンピュータ処理能力の向上により、リアルタイムへの応用が不可能であったような計算処理が現実に出来るような環境になりつつある。このような処理の一つとしてHough変換がある。ここでは、Hough変換を例に、処理速度アップの効果的な例としてMEX関数化とその速度の最適化を順を追って説明していく。
Hough変換とは?
Hough変換とは、投票メカニズム(voting)を使った曲線パラメータ推定アルゴリズムである。ある種の積分操作をベースにしたアルゴリズムのため、一般的に使用されている微分操作をベースにしたエッジ検出、グルーピングなどのテクニックと比較してノイズを強調するようなことはない。そのためノイズに対しても強く比較的実用的なアルゴリズムの一つであると言える。Hough変換では、いくつかの組み合わせのパラメータにより与えられる曲線上に存在する点座標を投票する。では、簡単で一般的である2つのパラメータである直線にフィットするHough変換について考えてみよう。直線の式を
![]() (1)
(1)
とする。この式では、x,yは、2値化された画像中の点座標、m,cは、それぞれ傾き、切片パラメータを表す。今、上の式についてm,cを変数、x,yを定数であると考えてみよう。
![]() (2)
(2)
この式は、m-c座標系において直線を表すことになる。傾きと切片がx,yにより決定される。つまり点(x,y)は、m-c平面における直線の一部に対応することになる。m-c座標系では、傾きが0になった時、問題になる。そのため実用的にHough変換は、極座標現
![]() (3)
(3)
が使われる。この場合、観測点(x,y)は、![]() 座標空間にマッピングされる。直線の場合、もし複数点nが同じ観測座標x-yの直線上にあった場合、それらに対応する同じポイント
座標空間にマッピングされる。直線の場合、もし複数点nが同じ観測座標x-yの直線上にあった場合、それらに対応する同じポイント![]() をさすことになる。このことを利用し、
をさすことになる。このことを利用し、![]() 空間にマスを作り対応する点に対し投票する。最も投票の大きい個所
空間にマスを作り対応する点に対し投票する。最も投票の大きい個所![]() 、つまりもっともマッチングする個所がもっともマッチした直線を意味する。
、つまりもっともマッチングする個所がもっともマッチした直線を意味する。
Hough変換のアルゴリズム
l 適当にパラメータ空間の量子化する。
l それぞれのパラメータ空間におけるセルを加算できるユニットと仮定する。すべてのセルを0に初期化する。
l 画像空間において2値化したそれぞれの(x,y)ポイントに対応するパラメータ空間のセルに1を加える。
l 加算されたセルの最大値がパラメータモデルの最も特徴となるパラメータになる。
この手順がHough変換と言われる。ここでのパラメータ空間は離散的な配列を仮定している。先の説明では、直線を例に扱かった。特徴となるパラメータは、パラメータ空間の中の最大値で表現できる。またこの方法は、直線だけでなく円、曲線などにも適用可能である。Hough変換は、エッジ点におけるつながりやグルーピングなどのテクニックを要求しない。多少のノイズがある場合でも直線検出が可能である特徴を持つ。Hough変換の前提にあるものは、現存する大きなイメージ中の最もフィットするカーブ(直線)を見つけることである。パラメータ空間の中のピークが1つ以上ある場合には、その重心となる個所が推定パラメータになる。いくつかのカーブ(直線)のイメージが一致した場合には、パラメータ空間においていくつかのピークが出来る。この点を利用し、おのおののピークから、カーブ(直線)を検出することも可能である。この場合、どの程度の投票の大きさまでを直線またはノイズとみなすかが問題となる。
もうひとつのHough変換の問題は、推定するパラメータの解像度は、離散パラメータ空間の大きさに関係している点である。解像度を高くしたい場合には、それなりのメモリ空間と処理時間が要求される。
また、Hough変換を直線でなく、カーブに円を適用する場合、パラメータは3次元になる。当然のことながら推定するパラメータ空間の次元が増えると、処理時間、メモリ空間とも指数的に必要になる。そのためHough変換は、多パラメータモデルに対しては、計算量が非常に多くなるため一般的には、あまり実用的はなくなってしまう。これら高速化の手法に関しては、様々な手法が論文として提案されているので各自探してもらいたい。
実際のHough変換のインプリメンテーション
では、実際MATLABでのhough変換のインプリメンテーションを見てみよう。このインプリメンテーションは、MATLABサイト(http://www.mathworks.com)のuser contributed Libraryの中のDimitrios Ioannou 氏の作成したhough.mのコメントの部分を削除しエッセンスの部分のみを表示したものである。
function
res=hough(im,rhomax,thetamax)
[X,Y]=size(im);
if X~=Y,return;
 elseif
rem(X,2)==1, return
elseif
rem(X,2)==1, return
end
d_rho=X/rhomax;
![]() d_theta=pi/thetamax;
d_theta=pi/thetamax;
theta=0:d_theta:pi-d_theta;
 smat=sin(theta);
smat=sin(theta);
cmat=cos(theta);
 [x,y]=find(im);
[x,y]=find(im);
% translation by a pixel so
that low left pixel has (0,0)
![]() x=x-1;
x=x-1;
y=y-1;
h1=((y-Y/2) * smat + (x-X/2)
* cmat )/d_rho;
h2=h1+rhomax/2;
![]() h3=round(h2);
h3=round(h2);
![]() res=zeros(rhomax,thetamax);
res=zeros(rhomax,thetamax);
for j=0:rhomax-1
res(j+1,:)=sum(h3==j);
end
この関数では、入力されるイメージ行列は、偶数であり同じ大きさである必要がある。出力されるパラメータrho,thetaの解像度は、こちらで整数値を指定できる。この関数の処理は,大きく分けて
1.サイン・コサインテーブルの作成
2. find関数による二値化
3.hough変換処理
4.処理データの配列処理
の四つからなる。sin,cos関数は、比較的処理時間がかかる上、何回も参照されるため、あらかじめテーブルとして計算しておきそのテーブルの値を利用するようにしている。この方法は、C言語やMATLABなどでも適用できる高速化のテクニックの一つである。このスクリプトはMATLABの特性を考え、4の処理データの配列処理にあるfor文を除きほぼすべて処理でベクトル化し、高速化、簡潔な記述を実現している。
MEX関数によるHough変換アルゴリズムのインプリメント
では,この関数をMEX関数化してみよう.なおここで書かれたMEX関数は、一応C++言語の機能も使っているため、コンパイルする場合には、拡張子.cppで保存する必要がある。
MEX関数では、
function
res=hough(im,rhomax,thetamax)
の部分を変換すると
#include <stdio.h>
#include <math.h>
#include "mex.h"
void mexFunction(int
nlhs,mxArray *plhs[],int nrhs,const mxArray *prhs[]) {
if ((nrhs != 3) || (nlhs != 1)) {
mexPrintf("function
res=hough(im,RHO_MAX,THETA_MAX)\n");
mexPrintf("Translated from m file Copyright 1999
Gerox(c)%s\n",__DATE__);
mexErrMsgTxt("\n");
}
int Y = (int)mxGetN(prhs[0]);
int X = (int)mxGetM(prhs[0]);
int rhomax = (int)mxGetScalar(prhs[1]);
int thetamax = (int)mxGetScalar(prhs[2]);
double *im = mxGetPr(prhs[0]);
plhs[0] = mxCreateDoubleMatrix(rhomax,thetamax,mxREAL);
}
となる.MATLABで実行するには,mexFunctionを使う.MEX関数か与えられる引数のポインタは,prhs,plhs配列の中に含まれ(それぞれ右辺,左辺を意味)る.nrhs,nlhsは,実行時の各引数の数を示している.MATLABでは,入出力の引数の数を実行時に指定することができる.引数のポインタから実際の値を取り出すには,mxGetScalar, mxGetPrなどの関数を用いる.
1.サイン・コサインテーブルの作成
theta=0:d_theta:pi-d_theta;
smat=sin(theta);
cmat=cos(theta);
MATLABでは,たったの三行で表現できるが,C言語で同等の表現をすると以下のようになる.
double *smat = (double*)mxCalloc(thetamax,sizeof(double));
double *cmat = (double*)mxCalloc(thetamax,sizeof(double));
double tmp;
int i;
for (i = 0,tmp=0.0;i < thetamax;tmp += d_theta,i++) {
smat[i] = sin(tmp);
cmat[i] = cos(tmp);
}
SIN,COSテーブルの大きさは,実行時の解像度の指定の時に決まる.MEX関数の場合、配列の大きさを実行時に指定するには,mxCalloc関数により動的にメモリの確保をする必要がある。また,プログラムが終わるときは,必ずmxFree関数で確保したメモリを開放する必要がある。
2. find関数による二値化
[x,y]=find(im);
この命令では,im配列の中で0で無い座標をすべてx,yベクトルとして取り出せと言う命令である.この命令をC言語で書くと以下のようになる.
int f_length = 0;
for (i = 0;i < X * Y;i++) if(im[i] > 0) f_length++;
int *x = (int*)mxCalloc(f_length,sizeof(int));
int *y = (int*)mxCalloc(f_length,sizeof(int));
int count = 0;
for (i = 0;i < Y;i++) {
for(j = 0;j < X;j++) {
if(im[i * X + j] > 0) {
x[count] = j;
y[count] = i;
count++;
}
}
}
MATLABでは配列の大きさは、実行時でもあらかじめ宣言すること無く変更することができるが、C言語ではそのようなことはできない。また、C言語で配列の大きさを実行時に宣言するには,ポインタを用い動的にメモリを確保する必要がある。そのため上のプログラムでは,まずfor文で配列imの要素の中で0より大きい数字が何個あるか調べている。その数がわかってから動的に確保した配列に値を代入している。
3.hough変換処理
h1=((y-Y/2) * smat + (x-X/2)
* cmat )/d_rho;
h2=h1+rhomax/2;
h3=round(h2);
MATLABでは,全ての処理は,ベクトルでできるためたったの三行で終わってしまう。
1行目がHough変換のメインとなるところである。x,y座標とも中心が0となるようにオフセットX/2,Y/2を差分してから、sin,cosの計算しd_rhoで出力がrhoの最大値を超えないようにスケーリングしている。
2行目のh2は、配列のパラメータ化するための処理である。MATLABでの配列パラメータは、1より大きな値でなければならないためオフセットrhomax/2を加え全ての計算値が正の値になるようにしている。
int **h2;
h2 = (int**)mxCalloc(f_length,sizeof(int*));
for(i = 0;i < f_length;i++) h2[i] =
(int*)mxCalloc(thetamax,sizeof(int));
int rhomax_2=int(rhomax / 2.0);
for(i = 0;i < f_length;i++) {
for(j = 0;j < thetamax;j++) {
h2[i][j] = int((y[i] * smat[j] + x[i] * cmat[j]) +
rhomax_2);
}
}
まず,mxCalloc関数により二次元配列h2を動的に確保している。次にhough変換したデータをh2に代入している.ここでのh2は,実は,h3の処理をしているのだがC++でのint関数(切り捨て)とMATLABのround関数(四捨五入)では,若干動作が異なるため,微妙に計算結果が異なる。(実用上ほとんど問題無いと思われるが.)
4.処理データの配列処理
for j=0:rhomax-1
res(j+1,:)=sum(h3==j);
end
ここでh3==j演算を行うと、h3行列と同じ大きさの行列が出力される。その行列の中身は、h3行列の要素の値がjである行列の要素の所を1に他の行列の要素を0となる行列が出力される。SUM関数の入力引数が行列の場合には、列要素ごとに合計が計算される。つまり、この場合、列要素の中で同じjとなる配列要素の数をカウントし合計しその結果をresへ代入している。C言語でこれと等価の処理を記述すると以下のようになる。
double *yy = mxGetPr(plhs[0]);
for (register int jjj = 0;jjj < rhomax;jjj++) {
for (register int iii = 0;iii < thetamax;iii++) {
for (register int k = 0; k < f_length;k++) {
if(h2[k][iii] == jjj) yy[(int)(jjj+iii *
rhomax)] += 1.0;
}
}
}
この処理がHough変換のメインとなる投票(voting)である。
以上の処理を踏めば良い.これをまとめたのが以下のプログラムである。
----------------- direct
translated version------------------------------------------------------
#include <stdio.h>
#include <math.h>
#include "mex.h"
void mexFunction(int
nlhs,mxArray *plhs[],int nrhs,const mxArray *prhs[]) {
if ((nrhs != 3) || (nlhs != 1)) {
mexPrintf("function
res=hough(im,RHO_MAX,THETA_MAX)\n");
mexPrintf("Translated from m file Copyright 1999
Gerox(c)%s\n",__DATE__);
mexErrMsgTxt("\n");
}
double rhomax,thetamax;
rhomax = mxGetScalar(prhs[1]);
thetamax = mxGetScalar(prhs[2]);
//[X,Y]=size(im);
int Y = (int)mxGetN(prhs[0]);
int X = (int)mxGetM(prhs[0]);
if (X != Y) {
mexPrintf("Input image is not square.
Exiting!\n");
return;
} else {
if ((X % 2) == 1) {
mexPrintf("Input image size has to be even in
pixels. Exiting!\n");
return;
}
}
double *im;
im = mxGetPr(prhs[0]);
double pi = 3.14159265358979;
// double d_rho=double(X)/ rhomax;
double d_theta=pi / thetamax;
// theta=0:d_theta:pi-d_theta;
double tmp;
int i,j;
//smat=sin(theta);
//cmat=cos(theta);
double *smat = (double*)mxCalloc(thetamax,sizeof(double));
double *cmat = (double*)mxCalloc(thetamax,sizeof(double));
double dd_rho = rhomax / double(X);
for (i = 0,tmp= 0.0;i < thetamax;tmp += d_theta,i++) {
smat[i] = sin(tmp) * dd_rho;
cmat[i] = cos(tmp) * dd_rho;
}
// [x,y]=find(im);
int f_length = 0;
for (i = 0;i < X * Y;i++) if(im[i] > 0) f_length++;
int *x = (int*)mxCalloc(f_length,sizeof(int));
int *y = (int*)mxCalloc(f_length,sizeof(int));
int count = 0;
for (i = 0;i < Y;i++) {
for(j = 0;j < X;j++) {
if(im[i * X + j] > 0) {
x[count] = j - X/2;
y[count] = i - Y/2;
count++;
}
}
}
int **h2;
h2 = (int**)mxCalloc(f_length,sizeof(int*));
for(i = 0;i < f_length;i++) h2[i] =
(int*)mxCalloc(thetamax,sizeof(int));
int rhomax_2=int(rhomax / 2.0);
for(i = 0;i < f_length;i++) {
for(j = 0;j < thetamax;j++) {
h2[i][j] = int((y[i] * smat[j] + x[i] * cmat[j]) +
rhomax_2 + 0.5);
}
}
plhs[0] = mxCreateDoubleMatrix((int)rhomax,(int)thetamax,mxREAL);
double *yy = mxGetPr(plhs[0]);
for (register int jjj = 0;jjj < rhomax;jjj++) {
for (register int iii = 0;iii < thetamax;iii++) {
for (register int k = 0; k < f_length;k++) {
if(h2[k][iii] == jjj) yy[(int)(jjj+iii *
rhomax)] += 1.0;
}
}
}
mxFree(smat);
mxFree(cmat);
mxFree(x);
mxFree(y);
for(i = 0;i < f_length;i++) mxFree(h2[i]);
mxFree(h2);
}
素直にMATLABスクリプトをMEX関数化するだけで、処理速度が約50%の速くすることが出来る。(と言っても40秒が20秒になるだけだが...)一応、MEX関数にすることだけでも,高速化できるのであるがこれでもリアルタイム応用には、程遠い速さである。C言語の特性を生かし,チューニングする方法(register 宣言や、static 宣言など)も考えられるが,良くなっても20%程度のアップしかならない。
MEX関数 高速化のためのテクニック
特に,このスクリプトを直接翻訳したHough変換関数の中を注意深く検討してみると、forループが多用されていることがわかる。MATLABでもそうであるが、C言語でもforループ内の処理は(何回も処理するので)時間がかかる。そのためループ内の処理を少し減らすだけでもかなり処理速度をアップすることができる.作ったMEX関数の部分を詳しく見てみよう。Hough変換のための2次元パラメータ空間配列を宣言し計算している個所がある。ここでの処理は、オフセットX/2,Y/2の引く操作をするために配列を宣言し計算している。C言語の場合、配列を動的に宣言するには、あらかじめその配列の数が分かっている必要がある。そのためまず該当する点が何点あるかf_lengthでカウントしチェックしている。
int f_length = 0;
for (i = 0;i < X * Y;i++) if(im[i] > 0) f_length++;
int *x = (int*)mxCalloc(f_length,sizeof(int));
int *y = (int*)mxCalloc(f_length,sizeof(int));
int count = 0;
for (i = 0;i < Y;i++) {
for(j = 0;j < X;j++) {
if(im[i * X + j] > 0) {
x[count] = j - X/2;
y[count] = i - Y/2;
count++;
}
}
}
int **h2;
h2 = (int**)mxCalloc(f_length,sizeof(int*));
for(i = 0;i < f_length;i++) h2[i] =
(int*)mxCalloc(thetamax,sizeof(int));
int rhomax_2=int(rhomax / 2.0);
for(i = 0;i < f_length;i++) {
for(j = 0;j < thetamax;j++) {
h2[i][j] = int((y[i] * smat[j] + x[i] * cmat[j]) +
rhomax_2 + 0.5);
}
}
カウントのためのループは、以下のように変更すると減らせる上にx,yの配列の確保が不要になる。
int f_length = 0;
for (i = 0;i < X * Y;i++) if(im[i] > 0) f_length++;
int **h2;
h2 = (int**)mxCalloc(f_length,sizeof(int*));
for(i = 0;i < f_length;i++) h2[i] =
(int*)mxCalloc(thetamax,sizeof(int));
double rhomax_2=rhomax / 2.0;
int count = 0;
int Y_2 = Y/2;
int X_2 = X/2;
for (int ii = 0;ii < Y;ii++) {
for(int jj = 0;jj < X;jj++) {
if(im[ii * X + jj] > 0) {
for(int k = 0;k < thetamax;k++) {
h2[count][k] = (int)((ii - Y_2) * smat[k] + (jj
- X_2) * cmat[k]+ rhomax_2 + 0.5);
}
count++;
}
}
}
plhs[0] = mxCreateDoubleMatrix((int)rhomax,(int)thetamax,mxREAL);
double *yy = mxGetPr(plhs[0]);
for (register int jjj = 0;jjj < rhomax;jjj++) {
for (register int iii = 0;iii < thetamax;iii++) {
for (register int k = 0; k < f_length;k++) {
if(h2[k][iii] == jjj) yy[(int)(jjj+iii *
rhomax)] += 1.0;
}
}
}
さらにもう一つ考えを進めてみよう。該当する点はf_lengthによりカウントされ、その数に合わせ2次元配列h2を動的に確保している。この計算では、h2行列の計算結果を元に更にループにより出力行列yyを計算している。実は、このh2の値の計算を最後のループに含めてしまうことで更にループの数を減らすことが出来る。
int rhomax_2=rhomax >> 1;
int Y_2 = Y >> 1;
int X_2 = X >> 1;
plhs[0] = mxCreateDoubleMatrix(rhomax,thetamax,mxREAL);
double *yy = mxGetPr(plhs[0]);
for (int ii = 0;ii < Y;ii++) {
for(int jj = 0;jj < X;jj++) {
if(im[ii* X + jj] > 0) {
for(int k = 0;k < thetamax;k++) {
int rho = (int)((ii-Y_2) *
smat[k] + (jj-X_2) * cmat[k] + rhomax_2 + 0.5);
if(rho < 0) continue;
else {
if(rho > X)
continue;
else yy[(int)(rho +
k * rhomax)] += 1.0;
}
}
}
}
}
これのようにすると、ループ数を減らすことができる上,中間変数として使用していた動的配列x,y,h2などの確保もなくすことができる。この様に注意深くプログラミングすることで従来のMATLABのスクリプトと比較すると約100倍程度の速度アップもできる。
----------------- optimized
for speed version------------------------------------------------------
#include <stdio.h>
#include <math.h>
#include "mex.h"
void mexFunction(int
nlhs,mxArray *plhs[],int nrhs,const mxArray *prhs[]) {
if ((nrhs != 3) || (nlhs != 1)) {
mexPrintf("function
res=hough(im,RHO_MAX,THETA_MAX)\n");
mexPrintf("Translated from m file Copyright 1999
Gerox(c)%s\n",__DATE__);
mexErrMsgTxt("\n");
}
int rhomax,thetamax,X,Y;
rhomax = (int)mxGetScalar(prhs[1]);
thetamax = (int)mxGetScalar(prhs[2]);
//[X,Y]=size(im);
Y = (int)mxGetN(prhs[0]);
X = (int)mxGetM(prhs[0]);
if (X != Y) {
mexPrintf("Input image is not square.
Exiting!\n");
return;
} else {
if ((X % 2) == 1) {
mexPrintf("Input image size has to be even in
pixels. Exiting!\n");
return;
}
}
double *im;
im = mxGetPr(prhs[0]);
double pi = 3.14159265358979;
double d_theta=pi / (double)thetamax;
// theta=0:d_theta:pi-d_theta;
double *smat = (double*)mxCalloc(thetamax,sizeof(double));
double *cmat = (double*)mxCalloc(thetamax,sizeof(double));
double dd_rho = (double)rhomax / (double)X;
double tmp;
int i;
for (i = 0,tmp=0.0;i < thetamax;tmp += d_theta,i++) {
smat[i] = sin(tmp) * dd_rho;
cmat[i] = cos(tmp) * dd_rho;
}
// [x,y]=find(im);
int rhomax_2=rhomax >> 1;
int Y_2 = Y >> 1;
int X_2 = X >> 1;
plhs[0] = mxCreateDoubleMatrix(rhomax,thetamax,mxREAL);
double *yy = mxGetPr(plhs[0]);
for (register int ii = 0;ii < Y;ii++) {
for(register int jj = 0;jj < X;jj++) {
if(im[ii* X + jj] > 0) {
for(register int k = 0;k < thetamax;k++)
{
register int rho =
(int)((ii-Y_2) * smat[k] + (jj-X_2) * cmat[k])+ rhomax_2 + 0.5);
// if((rho
> -1) && (rho < X)) yy[(int)(rho + k * rhomax)] += 1.0;
if(rho < 0) continue;
else {
if(rho > X)
continue;
else yy[(int)(rho +
k * rhomax)] += 1.0;
}
}
}
}
}
mxFree(smat);
mxFree(cmat);
}
Hough変換の使用例
ここでの入力は、ペニーの丸い画像を2値化した画像である。50,50は、投票の際のメッシュの大きさを意味する。このインプリメンテーションでは、縦と横サイズは同じ画像でありかつデータ点数は偶数データのみしか処理できない。ここでは、円をhough変換により円を検出している。円の画像は、直線で近似するのは難しいが、Hough変換した画像の上部にうっすらとカーブ状にピークが出力されているのが確認できると思う。
使用例
close all
load penny
figure;imshow(P,[ ]);
data=P>200;
figure; imshow(data,[ ]);
result=houghf(data,50,50);
figure;imshow(result,[ ]);

原画 2値化した画像 Hough変換後
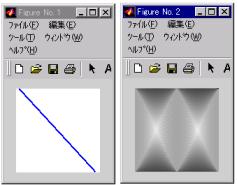
Hough変換サンプル例その1
実際にHough変換した例を示そう。上記のMEX関数(houghf.cpp)を応用したサンプルスクリプトを示す。ここでは、直線データを0度30度60度90度と回転させそれぞれhough変換をした図とy軸を5,15,25,35にずらして変換した図である。左側がオリジナルデータ真ん中が投票の結果、右側が最大値の変化を示している。この左側の図では、直線の角度のみが変化していることから最大値が左から右へ移動していく様子が見れる。右側の図では最大値が、上から下に下がっていく様子が見れる。