ロボットモデリング応用例(2026.07.23)
ロボットモデリングの本のプログラムの応用として,大学院の授業で出した課題の作品を紹介します。
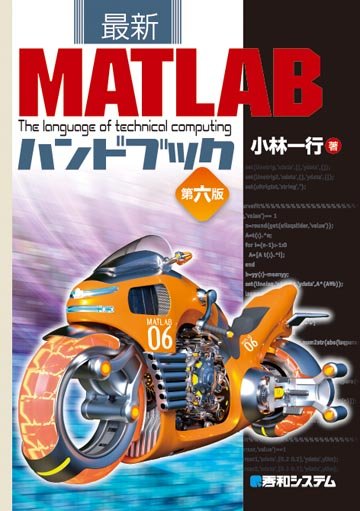
1.キリン
ソースコード fujii.zip
2.ショベルカー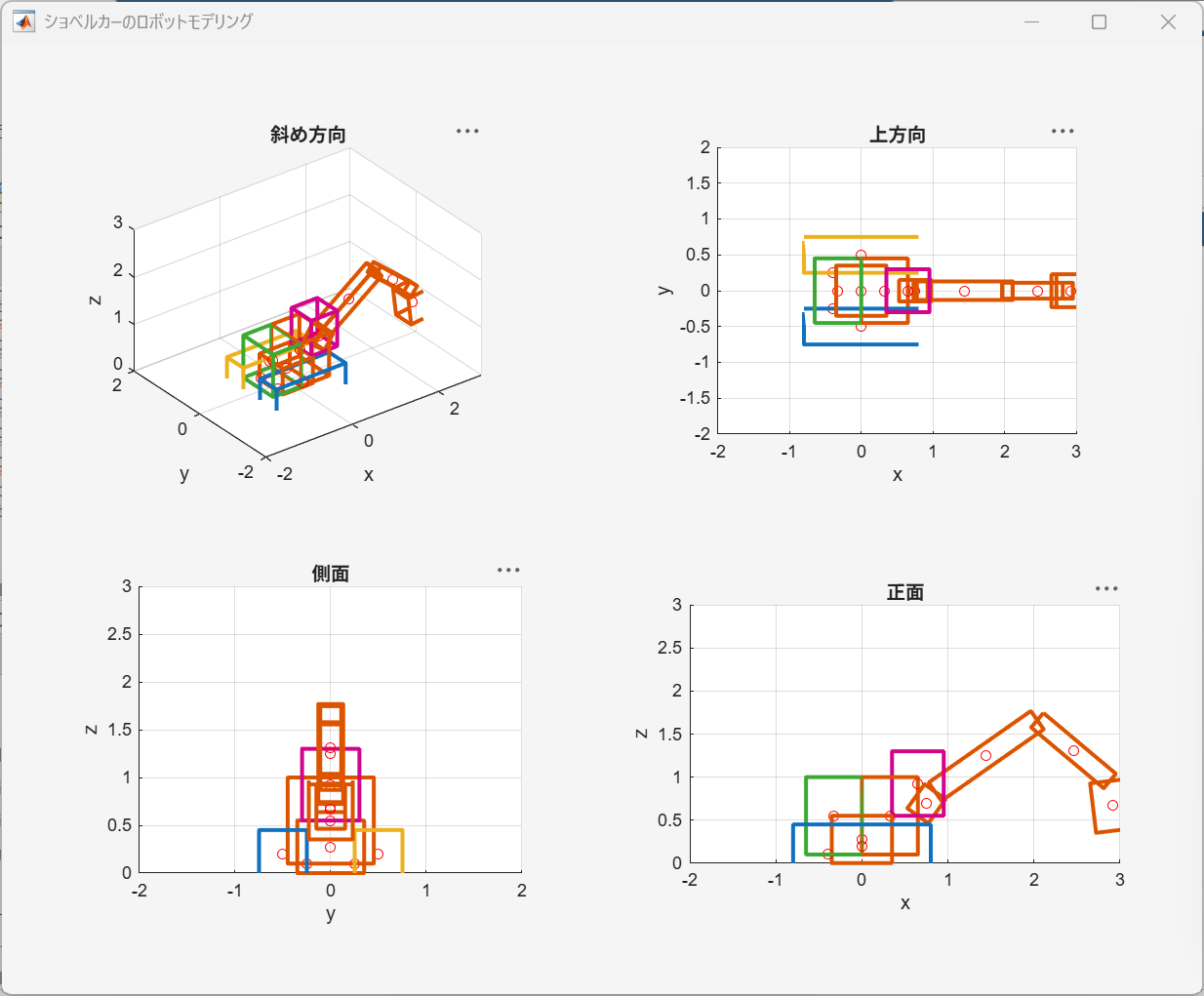
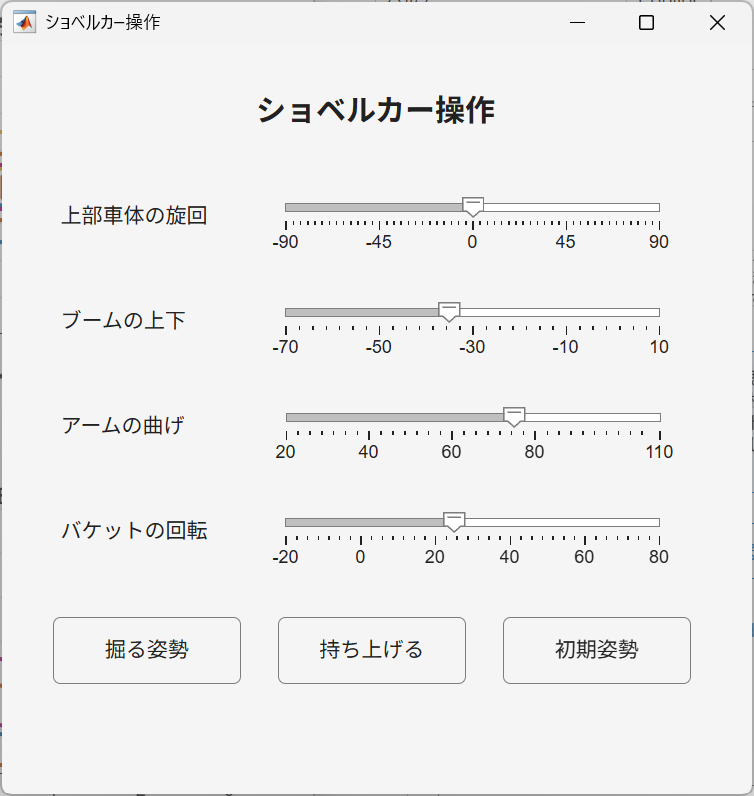
ソースコード hatori.zip
3.恐竜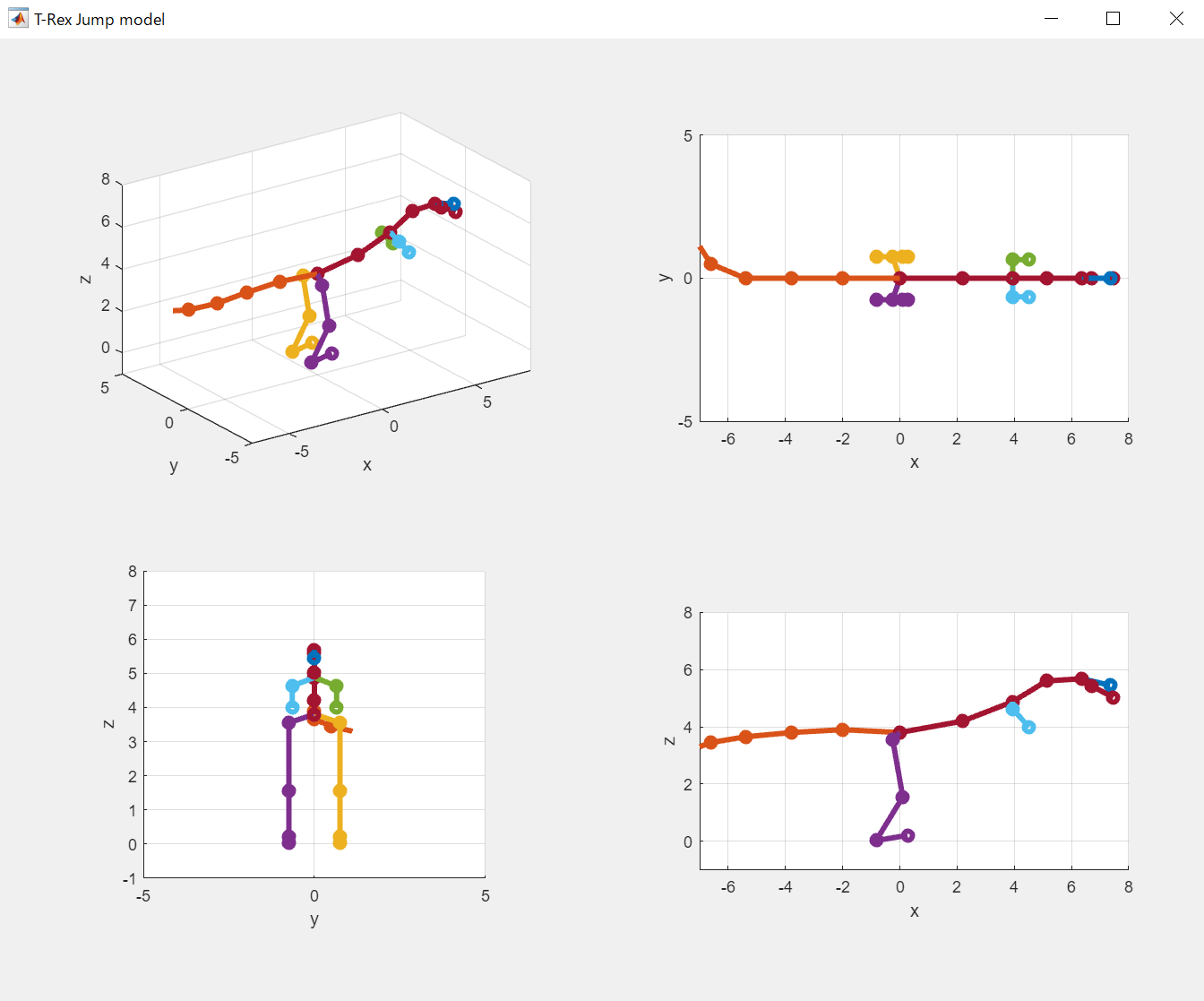
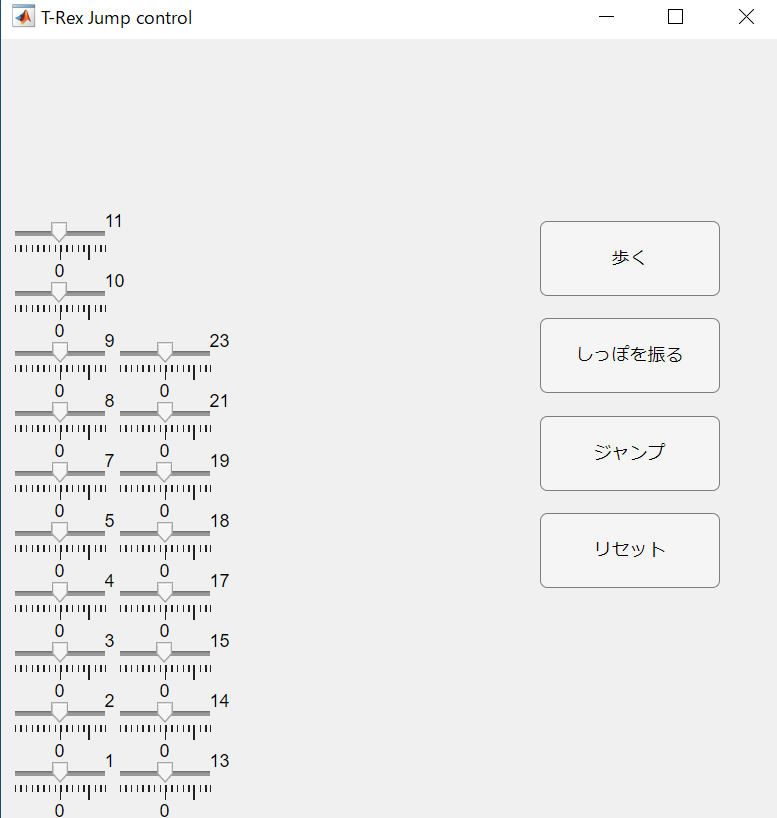
ソースコード makaya.zip
4.馬と人
ソースコード syozawa.zip
5.野球投球フォーム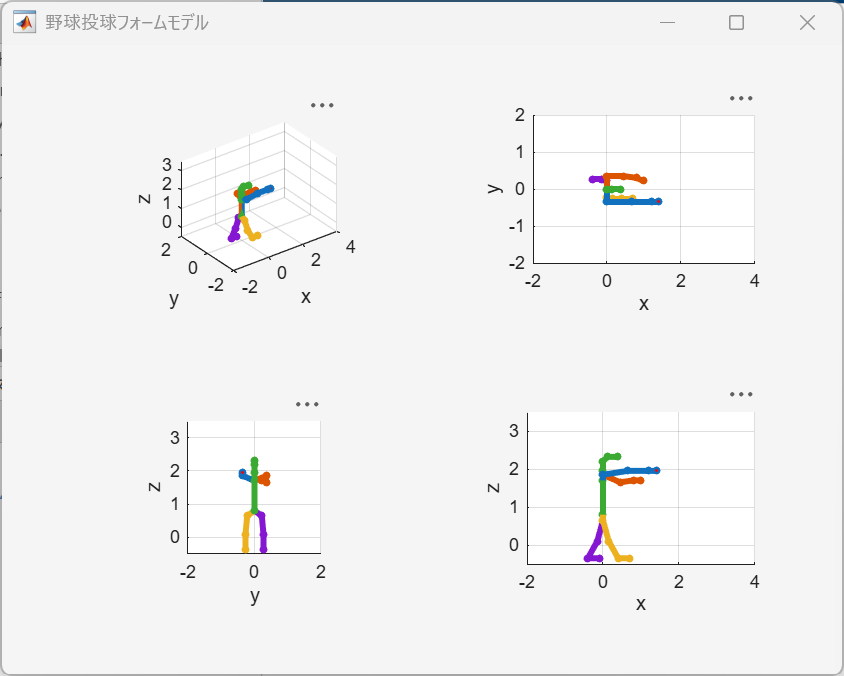
ソースコード gondo.zip
6.鳥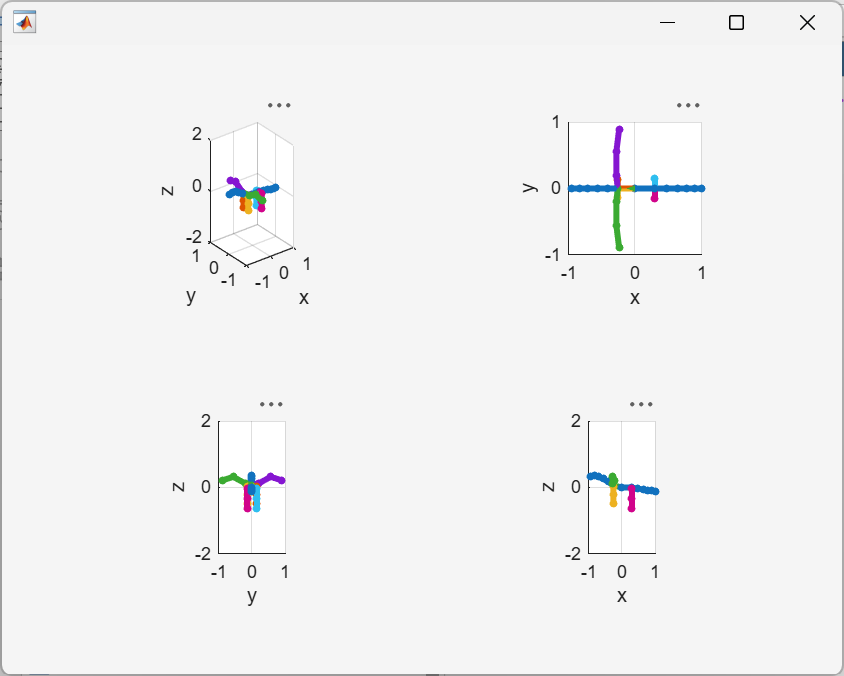
ソースコード kato.zip
7.ショベルカー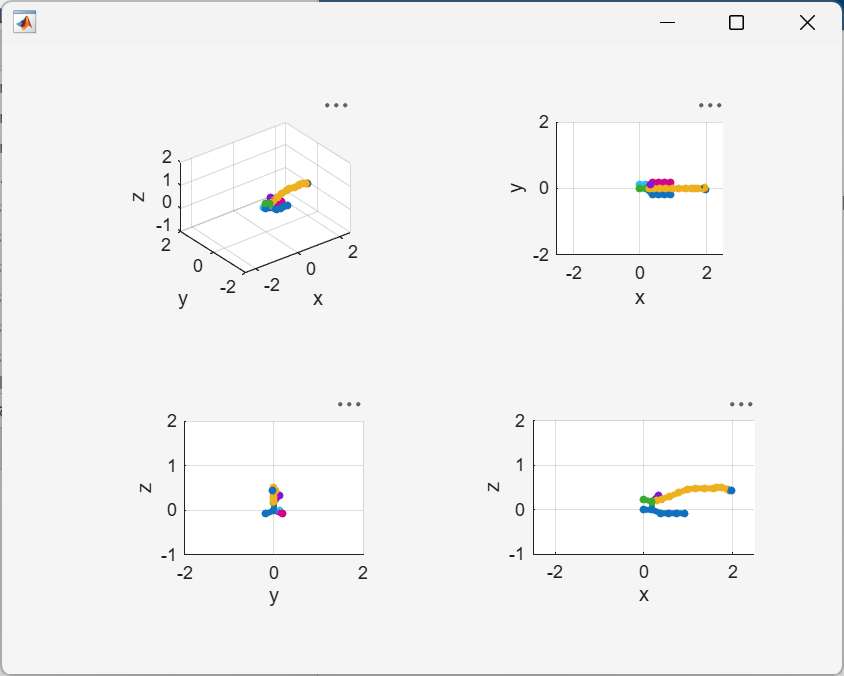
ソースコード saitou.zip
8.猫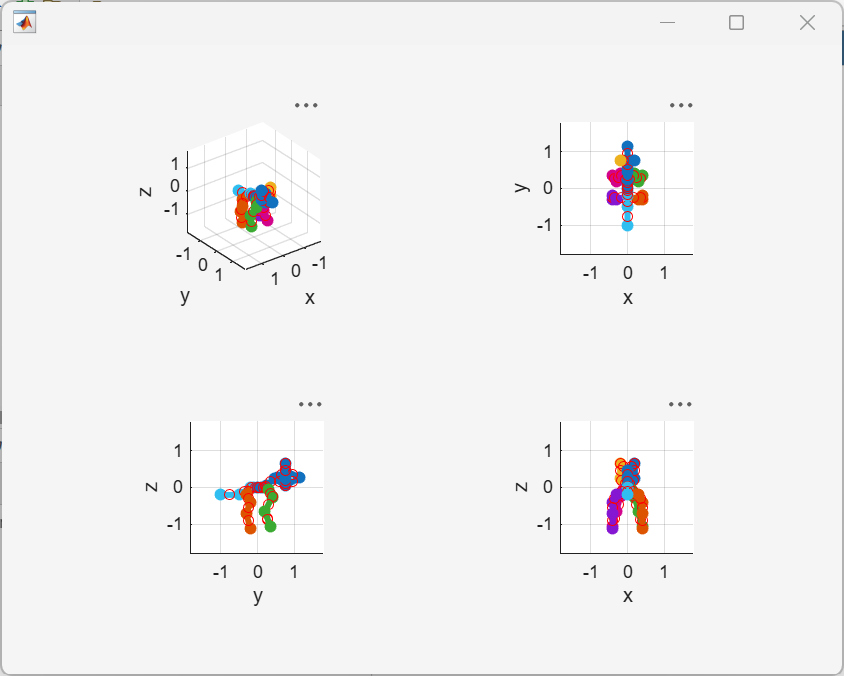
ソースコード tanaka.zip
【MATLAB書籍】に過去の応用サンプルがあります。
出場した屋外競技大会の成績一覧(2026.07.03)
|
今までの成績一覧です。詳細は,メインメニュ-のIGVC,または,https://www.arl.k.hosei.ac.jpを御覧下さい。 |
|||||||
|
参加回数 |
Year |
||||||
|
|
main |
bonus |
Design |
Vehicle Name |
Record |
Vehicle Name |
|
|
25/18 |
2026 |
1st Self Drive Grand Award |
-- |
4th place |
|
Orange alpha 2026 |
|
|
24/17 |
2025 |
1st Self Drive Challenge |
-- |
(Group C) 2386/2700 |
650m(24min)Milestone 1 |
Orange papa 2025 |
|
|
--/16 |
2024 |
Nonparticipation |
450m(14min) |
Orange Main |
|||
|
23/15 |
2023 |
6th place |
-- |
4th place |
?m(35min) |
Orange2023 |
|
|
22/14 |
2022 |
5th place |
-- |
1st place |
1400m(54min) |
Orange2022 |
|
|
--/13 |
2021 |
Nonparticipation |
343sec |
Orange2021L |
|||
|
--/-- |
2020 |
|
|||||
|
21/12 |
2019 |
Nonparticipation |
5th Place |
4th place |
|
Orange2019 |
|
|
|
Orange B3 2019 |
||||||
|
20/11 |
2018 |
Total 1st place |
1st place |
4th place |
530m(24min) |
Orange2018 |
|
|
190m(12min) |
Orange B3 2018 |
||||||
|
19/10 |
2017 |
Total 2nd place |
3rd place |
(Group B) |
2km(72min30sec) |
Orange2017 |
|
|
100m(12min30sec) |
Orange Light 2017 |
||||||
|
--/09 |
2016 |
Nonparticipation |
1.2km(42min21sec) |
Orange2016 |
|||
|
490m(21min30sec) |
Orangemini |
||||||
|
18/08 |
2015 |
-- |
6th place |
6th place |
200m(10min35sec) |
Orange2015 |
|
|
|
Orange mini 2015 |
||||||
|
17/07 |
2014 |
Total 3rd place |
1st place |
5th place |
358.4m |
Active2014 |
|
|
16/06 |
2013 |
Total 2nd place |
1st place |
(GroupC) |
974m |
Orange2013 |
|
|
15/05 |
2012 |
Total 2nd place |
2nd place |
(GroupC) |
480m(25min) |
Active2012 |
|
|
840m(40min) |
Orange2012 |
||||||
|
14/04 |
2011 |
Total 3rd place |
5th place Navigation Challenge |
5th place(GroupC) |
Qualify pass (22min35sec) |
Active2011 |
|
|
Qualify pass (18min20sec) |
Orange2011 |
||||||
|
13/03 |
2010 |
Total 2nd place |
2nd place Navigation Challenge |
5th place |
Qualify pass |
Orange2010 |
|
|
Qualify pass(24min48sec) |
Amigo2010 |
||||||
|
--/02 |
2009 |
Qualify pass(7min53sec) |
Amigo2009 |
||||
|
12/01 |
2008 |
Total 7th place |
3rd place Navigation Challenge |
8th place |
Qualify pass |
Amigo2008 |
|
|
11/-- |
2007 |
Total 2nd place |
|
2nd place |
|
|
|
|
10/-- |
2006 |
Total 4th place |
JAUS Level I pass |
6th place |
|
|
|
|
09/-- |
2005 |
14th place |
7th place Navigation Challenge |
5th place |
|
|
|
|
08/-- |
2004 |
Total 2nd place |
1st place |
4th place |
|
|
|
|
08/-- |
2003 |
Nonparticipation(Because of SARS) |
|
|
|||
|
07/-- |
2002 |
1st place |
1st place |
7th place |
|
|
|
|
06/-- |
2001 |
6th place |
1st place |
12nd place |
|
|
|
|
05/-- |
2000 |
2nd place |
1st place |
8th place |
|
|
|
|
|
3rd place |
|
|
|
|||
|
04/-- |
1999 |
2nd place |
2nd place |
10th place |
|
|
|
|
03/-- |
1998 |
3rd place |
2nd place |
14th place |
Vehitle |
|
|
|
02/-- |
1997 |
1st place |
-- |
19th place |
Oneway |
|
|
|
01/-- |
1996 |
-- |
-- |
13th place |
bob |
|
|
小林一行研究室

法政大学理工学部創生科学科(小金井キャンパス)
〒184-8584 小金井市梶野町3-7-2
TEL: 042-387-6267(研究室) 042-387-6260(実験室)
FAX: 042-387-6129
Email: ikko@hosei.ac.jp (迷惑メール防止のため、お手数ですがメールアドレスの@を半角に変えて送信ください。)
Room: 北館4F N406号室(研究室), 北館4F N4006 知能ロボット実験室(実験室) ,北館1F N101 ロボット工学実験室(実験室)
ようこそ小林一行研究室へ
小林一行研究室では、
ソフトとハードの融合による新たなシステムの研究開発
をテーマに、主に最近は、
・屋外環境における自律移動ロボットに関する研究
・新システムの提案
・センサアクチュエータの開発
・スポーツ計測応用
・ネットワーク・ソフトコンピューティング
に関する開発を行っています。