6月5日~6月8日にアメリカのデトロイトで開催されたIGVC2015に参加しました.
今年度も去年に引き続きDesign Competition, IOP Challenge, Auto-Nav Challengeの3部門に分かれての競技となり、結果、IOP Challenge, Design Competitionでともに6位に入賞しました.


Orange2015 競技風景
~IGVCとは~
Intelligent Ground Vehicle Competitionの略称.
学生のための地上自律移動ロボットの国際大会であり,毎年世界各国から数多くの大学が参加します.今大会ではDesign Competition, IOP Challenge, Auto-Nav Challengeの3部門で構成されています.
1.Design Competition
Design Competitionは車両のコンセプト、新規性、デザインを15枚のレポートでまとめ大会の事前に提出しその後大会中にプレゼンテーションを行い、車両のデザイン性を競う競技です.
予選があり参加チームをA,B,Cと分け各グループの上位2チームが決勝で再びプレゼンテーションを行うことができます.
結果、決勝に進出し6位入賞することができました.


Design Competition決勝 Design Competition 6th Place
2. IOP Challenge
IOP Challengeは無人システムの通信規格であるJAUSを用いた競技です.
チャレンジ内容は2つのステップに分かれており,第1ステップは無線ルーターを介して送られる指令37種類に対して適切に応答(通信)できるかを確かめます.第2ステップは決められたwaypointに指定速度で走るなど,ルーターから送られてくる指令通りに実際に実機(Orange2015)を動かす競技です.
2つのステップそれぞれに得点が配分されます.第1ステップの指令をすべてクリアしたチームは,第2ステップの実機走行で指定された速度や位置に,どれだけ正確に走ることができるかで順位を決めます.
結果,今年度は37種類すべての指令をクリアすることができず,第1ステップ止まりとなりましたが,なんとか6位入賞を果たすことができました・・・(^^;
来年は新しくJAUSのToolを使いこなし,優勝を目指したいと思います!!あとは,他大の方とも英語でコミュニケーションをとれるようになって,JAUSの情報交換もどんどん行いたいと思います(^^)

IOP Challenge風景 IOP Challenge 6th Place
3.Auto-Nav Challenge
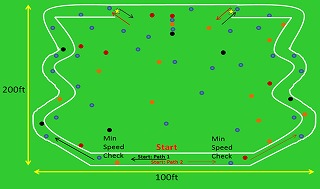
Auto-Nav Challengeは二本の障害物の間を障害物を避けながらいくつかの決められたwaypointを走行していかに速くゴールすることができるかを競う競技です.予選のBasic Courseと本選のAdvance Courseに分かれています.
結果、今年から一新した車体のアクシデントが続き、臨機応変に対処をしながら競技に臨みましたがBasic Courseを完走することができませんでした.
会場に生える長い草でタイヤがスリップしてしまったり、急勾配の坂で車体が横転してしまうなどの予想外のアクシデントも・・・
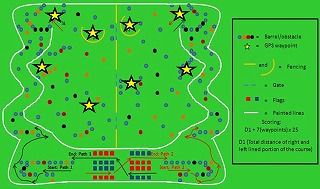
Basic Course Advance Course

IGVC Auto-Nav Challenge会場


走行中 ハードウェアの手直し
< Grand Award >
Design Competition, JAUS Challenge, Auto-Nav Challengeの3部門のポイントのトータルでは残念ながら結果を残すことができませんでした.

全体写真
次回のIGVCでは今年の経験を生かしてトロフィーを獲得したいです!!