メンバー: 青栁 秀弥(M1), 河野 斗志樹(B4), 早井 美結(B4), 松本 結(B4), 渡邊 陸(B4), 不破 良太(B4),中村 亮太(M2), 清水 智裕(M2), 四木 宏香(M2)
2019年6月7日(金)から10日(月)にアメリカのミシガン州オークランド大学で開催された自律移動ロボットの大会である,第27回IGVC大会(The 27th Annual Intelligent Ground Vehicle Competition) に,理工学部創生科学科小林一行研究室チームの車両Orange2019として出場しました. 今年は,米国,カナダ,インド,日本から30チームが参加し競い合いました.
その中でIOP Challenge部門で5位入賞,Design Competition部門で4位入賞をしました.
表彰式の様子
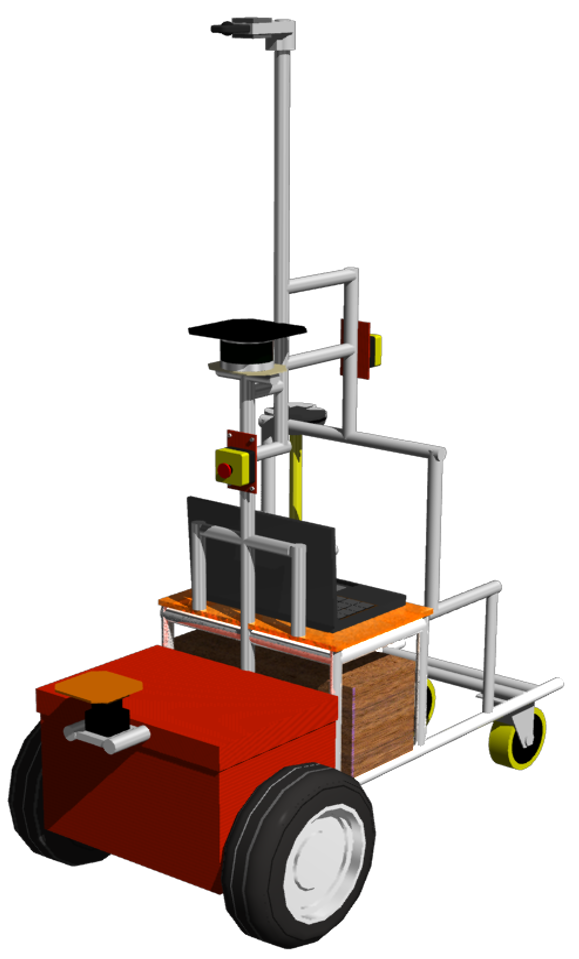
Orange2019

会場の全体
~IGVCとは~
Intelligent Ground Vehicle Competitionの略称.
学生のための地上自律移動ロボットの国際大会であり,毎年世界各国から数多くの大学が参加します.今大会ではDesign Competition, IOP Challenge, Auto-Nav Challenge,Spec2,Cyber Challengeの5部門で構成されています.その中でDesign Competition, IOP Challenge, Auto-Nav Challengeの3部門に参加しました.
1.Auto-Nav Challenge
Auto-Nav Challengeは二本の白線の間を障害物を避けながら指定されたGPSの座標を正確に通過し, いかに速く走行することができるかを競う部門です. 今年度は, 回路の不具合により走行することができませんでした.

Auto-Nav Course
2.IOP Challenge
IOP Challengeは無人システムの通信規格であるJAUSを用いた競技です.
この競技には,無線を介して送られる指令に対して適切に応答(通信)できるかを確かめるインターフェイスタスクと,実際のロボットを用いて, 送られた指令に対して走行するパフォーマンスタスクがありました. ロボットを動かすことができなかったため,パフォーマンスタスクはできませんでしたが,インターフェイスタスクですべての課題をクリアすることができ,IOP部門で5位入賞することができました.

IOP Challenge 競技の様子

IOP Challenge 5位入賞
3.Design Competition
Design Competitionは車両のコンセプト,新規性,デザインを15枚のレポートでまとめ大会の事前に提出しその後大会中にプレゼンテーションを行い,車両のデザイン性を競う部門です.
予選があり参加チームをA,B,Cと分け各グループの上位2チームが決勝で再びプレゼンテーションを行うことができます.
今回, 決勝に進むことができ, 結果4位入賞を果たしました.

Design Competition 決勝 発表風景

Design Competition 4位入賞
< Grand Award >
Design Competition, IOP Challenge, Auto-Nav Challengeの3部門のトータルポイントでは残念ながら結果を残すことができませんでした.
次回のIGVCで優勝できるよう,精進していきたいと思います!